Лаборатория робототехники и мехатроники была организована в 1981 году и первоначально называлась лабораторией робототехники (это название сохранялось до 1989 г.). Организовал лабораторию и в течение 27 лет был ее руководителем доктор технических наук профессор В.Г. Градецкий, который в настоящее время работает в лаборатории в должности главного научного сотрудника. С 2008 года лабораторией заведует доктор физико-математических наук Н.Н. Болотник.
В лаборатории проводятся фундаментальные и прикладные теоретические и экспериментальные исследования по механике и системам управления манипуляционных и локомоционных (мобильных) роботов. За время существования лаборатории ее сотрудниками получены фундаментальные результаты по изучению влияния упругости на динамические характеристики манипуляционных роботов; по методам активного и пассивного гашения колебаний объекта манипулирования (полезного груза), возникающих из-за упругости звеньев и шарниров манипулятора; по оптимальному управлению манипуляционными роботами; по динамике и управлению движением роботов, способных перемещаться по поверхностям произвольного наклона (включая стены и потолки зданий и сооружений) и внутри труб; по динамике и управлению движением мобильных роботов вибрационного принципа действия. Эти результаты признаны отечественными и зарубежными специалистами, они опубликованы в пяти монографиях и многочисленных статьях в российских и международных научных журналах, многие из них нашли практические приложения на предприятиях промышленности и энергетики.
Основной предмет исследований лаборатории в настоящее время - мобильные робототехнические системы, предназначенные для работы в экстремальных ситуациях и средах. К ним относятся в частности роботы, способные двигаться по сложным поверхностям переменного наклона (включая вертикальные и потолочные поверхности) с переменными физическими свойствами, и роботы, движущиеся внутри труб сложной конфигурации и произвольного наклона. Создание таких роботов требует проведения комплексных теоретических и экспериментальных исследований в области механики, сенсорики и обработки информации, планирования и оптимизации режимов движения, автоматического управления. В лаборатории ведутся исследования по всем названным направлениям. Наибольшее внимание уделяется следующим проблемам:
- разработке методов расчета динамики мобильных роботов для перемещения в недетерминированных средах по вертикальным, наклонным и нерегулярно расположенным в пространстве поверхностям;
- созданию систем адаптации, искусственного интеллекта манипуляционных и мобильных роботов, планирования траекторий, автоматического принятия решений;
- разработке компьютерных моделей движения роботов в экстремальных условиях и ситуациях (пожаротушение, разминирование, антитеррор, ядерная энергетика);
- развитию мехатронного подхода к проектированию многозвенных механических систем, приводов, адаптивных схватов, датчиков, преобразователей роботов и систем управления;
- разработке и исследованию моделей миниатюрных роботов для применения в медицине, в энергетике, в специальных условиях;
- механике интегрированных макро-, микро и наносистем.
Проводятся исследования по созданию мобильных микророботов, способных двигаться в условиях сильной пространственной ограниченности (в узких трубах, щелях) и обеспечивать высокую точность отработки заданных движений. Значительное внимание уделяется исследованиям по применению новейших технологий и материалов (включая нанотехнологии и наноматериалы) в робототехнике. Исследовано влияние структуры наноматериала, предназначенного для покрытия рабочих контактных поверхностей мини-робота вертикального перемещения, на его адгезивные и фрикционные свойства.
В лаборатории созданы уникальные мобильные роботы, которые могут двигаться по поверхностям сложной формы и произвольного наклона, включая стены зданий и потолки помещений. Роботы надежно удерживаются на стене или потолке с помощью вакуумных присосок. Такие машины имеют весьма широкую область применения. Они используются для производства сварочных, очистных и покрасочных работ на высотных сооружениях, для тушения пожаров в нефтехранилищах, для обследования реакторных помещений атомных электростанций, для диагностики повреждений корпусов морских судов. Они могут оказать неоценимую помощь при обследовании зданий с целью обнаружения взрывных устройств, которые могут быть заложены террористами. Эти роботы демонстрировались на российских и международных выставках и всегда получали высокую оценку.
Экспериментально исследованы мобильные роботы нового типа, которые не имеют традиционных движителей (колес, ног, гусениц, винтов), а передвигаются за счет изменения конфигурации или перераспределения внутренних масс, подобно змеям или рыбам. Изменение конфигурации приводит к возникновению и изменению силы трения между звеньями робота и средой, в которой он перемещается, именно по этой причине возможно движение робота как целого и управление им. Такой принцип движения представляется перспективным для миниатюрных роботов, которые могут выполнять различного вида работу в узких щелях или тонких трубопроводах. В лаборатории созданы минироботы вибрационного принципа действия с электромагнитным приводом для движения в трубах малого диаметра.
Лаборатория поддерживает тесные контакты с другими научно-исследовательскими институтами, вузами и промышленными предприятиями России. Среди учреждений РАН это Институт прикладной математики им. М.В. Келдыша, Институт проблем управления им. В.А. Трапезникова, Институт машиноведения им. А.А. Благонравова, Институт механики УНЦ РАН (г. Уфа). Исследования в области экстремальной робототехники ведутся в содружестве с Центральным научно исследовательским институтом робототехники и технической кибернетики (ЦНИИ РТК, Санкт-Петербург). Совместно с ведущими вузами Москвы - МГТУ им. Баумана, МГТУ "СТАНКИН", МФТИ, МИРЭА - на базе лаборатории осуществляется обучение студентов и аспирантов, избравших робототехнику своей специальностью. С МФТИ и МГТУ "СТАНКИН" в ИПМех РАН созданы научно-образовательные центры. Большое значение имеет сотрудничество по внедрению результатов исследований с ОАО "Концерн Росэнергоатом", Научно-техническим центром по аварийно-техническим работам - НТЦ АТР, Концерном "Наноиндустрия", Специальным конструкторско-технологическим бюро прикладной робототехники (СКТБ ПР), компанией "Системотехника".
Лаборатория робототехники и мехатроники активно участвует в международном научном сотрудничестве. Она представляет Россию в Международной программе по перспективной робототехнике (International Advanced Robotics Program - IARP). Сотрудники лаборатории ведут исследования по проектам Европейской научно-технической программы "Эврика", Международной программы по перспективной робототехнике IARP, Европейской программы по совершенствованию производственных процессов посредством интеграции макро-, микро- и нанотехнологий (Improvement of Production Processes through Integration of Macro-, Micro-and Nanotechnologies - IPMMAN) и других по следующей проблематике:
- улучшение промышленных систем посредством интеграции макро-, микро и нанотехнологий;
- исследование микроэлектромеханических мехатронных систем;
- движение интеллектуальных роботов в динамически изменяющейся внешней среде;
- механика и системы управления роботами вертикального перемещения, переходящими с одной поверхности на другую;
- движение мобильных роботов по нерегулярно расположенным в пространстве поверхностям;
- проблемы разминирования с помощью мобильных роботов;
- мобильные роботы для экстремальных сред.
Сотрудники лаборатории активно участвуют в организации национальных и международных конференций по робототехнике и мехатронике.
Основные публикации
Опубликовано более 200 научных статей, получено 25 авторских
свидетельств и патентов на изобретения, изданы 5 монографий:
1. Ф.Л. Черноусько, Н.Н. Болотник, В.Г. Градецкий. Манипуляционные роботы. Динамика, управление, оптимизация. М.: Наука, 1989.
2. F.L. Chernousko, N.N. Bolotnik, V.G. Gradetsky. Manupulation Robots: Dynamics, Control, Optimization. Boca Raton: CRC Press, 1994.
3. В.Г. Градецкий, М.Ю. Рачков. Роботы вертикального перемещения. М.: Тип. Мин. образования РФ, 1997.
4. В.Г. Градецкий, В.Б. Вешников, С.В. Калиниченко, Л.Н. Кравчук. Управляемое движение мобильных роботов по произвольно ориентированным в пространстве поверхностям. М.: Наука, 2001.
5. В.Г. Градецкий, М.М. Князьков, Л.Ф. Фомин, В.Г. Чащухин. Механика миниатюрных роботов. М.: Наука, 2010.
Подготовка научных кадров
В лаборатории было подготовлено 10 кандидатов наук и 4 доктора наук.
Награды, премии, почетные звания
Государственная премия Российской Федерации в области науки и техники (Ф.Л.�Черноусько, Л.Д. Акуленко, Н.Н. Болотник, В.Г. Градецкий, А.А. Меликян, 1998 год).
Звание "Заслуженный деятель науки Российской Федерации" (В.Г. Градецкий, 2002 год).
Медали СССР, России, национальных и международных выставок. За участие в Первой Международной олимпиаде роботов Глазго-90 (Англия) были получены две Золотые медали, экспонаты Международной выставки инноваций в Брюсселе (Бельгия) были удостоены Золотой медали.
Роботы, созданные в лаборатории

|
Робот вертикального перемещения с
комбинированным приводом поступательного и вращательного
движения. Тип привода - электропневматический. Скорость
перемещения - 0,2-1,5м/мин (регулируемая).
Грузоподъемность - 30 -100 кг. Габаритные размеры: длина
- 640мм, ширина - 550мм, высота - 250 мм. Собственная
масса - 38 кг. Робот предназначен для широкого круга
технологических операций: окраски, очистки, газовой
резки, сварки.
|
|
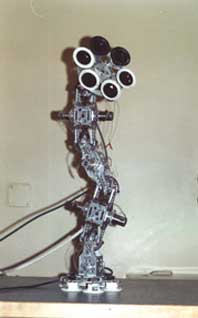
Универсальный робот для перемещения
по произвольно ориентированным поверхностям. Реализован
в виде многозвенной модульной конструкции, каждый модуль
которой обладает двумя степенями подвижности. Концевые
модули робота оснащены вакуумными схватами. Технические
характеристики: Тип приводов - электромеханический.
Грузоподъемность - 1,5 кг. Скорость перемещения - 3 м/мин.
Габаритные размеры: длина - 1000 мм, ширина (диаметр ЗУ)
- 240 мм, Собственная масса - 10,5 кг. |
 |
 |
Робот для очистки и диагностики
плоских поверхностей, произвольно ориентированных в
пространстве, с возможностью перехода с поверхности на
поверхность. Транспортным модулем служит колесная
платформа, удержание которой на наклоненной к горизонту
поверхности осуществляется с помощью скользящего
вакуумного захвата. Скорость движения - до 0.4 м/с,
масса - 22,5 кг, грузоподъемность - 5 кг, габаритные
размеры: 800х400х270 мм (в транспортном положении) |
|
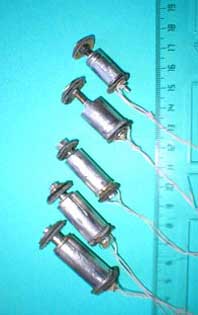
Мобильные миниатюрные роботы, которые
могут перемещаться внутри труб диаметром 10-20 мм и
выполнять операции технической диагностики. Тип привода
- электромагнитный, микрошаговый,
возвратно-поступательного типа. Создана целая гамма
таких роботов. Грузоподьемность 2 - 20 г, скорость
движения роботов достигает 60-70 мм/с в резонансном
режиме, масса роботов 20-50 г
|
 |
Сотрудники лаборатории
