Laboratory of Robotics and Mechatronics was organized in 1981. Initially it
was called Robotics Laboratory and this name was preserved until 1989. The
laboratory was organized by Professor Valery G. Gradetsky and was headed by
him for 27 years. The laboratory deals with fundamental and applied research
on mechanics and control of robotic systems, including manipulation robots,
technological robots, and mobile robots. The laboratory keeps close contacts
with other institutes of the Russian Academy of Sciences, universities, and
industrial enterprises.
Basic Research Lines
Wall-climbing robots
Sensory systems for manipulation robots and mobile robots
Motion of mobile robots in an uncertain environment
Intellectual robots
Mechanics and control systems of mini robots
Integration of micro- and nanocomponents in robotic systems
Development of modular mechatronic systems for enhanced maneuverability robots
Robots for operation in extreme conditions (fire-fighting robots, mine-cleaning robots, robots for the atomic industry)
Grants, Contracts, Projects
Modeling and experimental studies of motion of miniature-type multi-link robots (Russian Foundation for Basic Research, 05-01-00205)
Dynamics of interaction of traction devices with surfaces for miniature-type mobile robots moving in a complex environment (Russian Foundation for Basic Research, 08-01-00365)
Development of principles of motion for mobile mechatronic robots and systems using effects of the interaction of nano-materials with surfaces of various structures (Russian Foundation for Basic Research, 07-01-12015)
Analysis and synthesis of integrated control systems for complex objects operating in an uncertain environment (Program No 15 of the Department of Power Engineering, Machine Sciences, Mechanics and Control Processes of the Russian Academy of Sciences)
Development of the scientific foundation for machines using dynamic principles of operation (Program No 15 of the Department of Power Engineering, Machine Sciences, Mechanics and Control Processes of the Russian Academy of Sciences)
State Contract 02.514.11.4066 for research on the topic "Modeling of the motion of a human for industrial applications" (project Е-3760 - Humanoid ENTP "Eureka")
IMPROVEMENT OF INDUSTRIAL PRODUCTION INTEGRATING MACRO-, MICRO-, AND NANOTECHNOLOGIES FOR MORE FLEXIBLE AND EFFICIENT MANUFACTURING (International Project IPMMAN of the 6th European Program);
Contract with the Scientific Engineering Center for Emergency Technologies in Nuclear Power Stations for manufacturing a wall-climbing robot
Publications
Over 200 scientific papers, 25 patents and inventors certificates, 3 monographs
- Chernousko F.L., Bolotnik N.N., Gradetsky V.G., Manipulation Robots: Dynamics, Control, and Optimization (in Russian), Nauka, Moscow, 1989. English translation: CRC Press, Boca Raton, 1993.
- Gradetsky V.G. and Rachkov M.Yu., Wall-climbing Robots (in Russian), Ministry of Education, Institute for Problems in Mechanics of the Russian Academy of Sciences, Moscow, 1997.
- Gradetsky V.G., Veshnikov V.B., Kalinichenko S.V., and Kravchuk L.N. Controlled Motion of Mobile Robots along Arbitrarily Oriented Surfaces (in Russisn), Nauka, Moscow, 2001.
International Cooperation
The laboratory keeps scientific contacts with scientists from Austria, Finland, France Germany, India, Italy, Japan, and USA.
The laboratory participated in international projects under the European Scientific Engineering Program "Eureka" (1986-1990, 2006-2008), in the investigations under the International Advanced Robotics Program IARP (since 1997), and in the integrated project ЕС IPMMAN (2006-2008). Employees of the laboratory organized at the Institute for Problems in Mechanics a number of national and international conferences on key issues of the development of robotics and mechatronics (1985, 1987, 1990, 2003, 2005, 2007).
Training of scientists
Ten scientists that were trained at the laboratory received their Ph.D degrees,
and four scientists received D.Sc. degrees.
Awards
State Prize of the Russian Federation in the Field of Science and Technology (F.L. Chernousko, L.D. Akulenko, N.N. Bolotnik, V.G. Gradetsky, and A.A. Melikyan, 1998)
Professor V.G. Gradetsky was awarded the title "Honored Scientist of the Russian Federation" (2002)
The studies that were performed at the laboratory have been awarded Medals of the USSR and Russia, as well as with medals of national and international exhibitions. Two Gold Medals were received for the participation in the First International Robotics Olympic Games (Glasgow, Great Britain, 1990). The exhibits of the laboratory at the International Innovations Exhibition in Brussels (Belgium) were awarded a Gold Medal. The employees of the laboratory received 9 Gold Medals from All-Union Exhibition of Achievements in Economy and from the Russian Exhibition Center
Robots constructed at the laboratory

|
Wall-climbing robot with combined drive for translations and rotations.
The robot is designed for a wide range of technological operations
(painting, cleaning, gas cutting, welding). Operating characteristics.
Type of the drive: electropneumatic. Velocity: 0.2 to 5 m/min
(adjustable). Load carrying capacity: 30 to 100 kg.
Overall dimensions: 640mm (length) x 550mm (width) x 250mm (height).
Mass: 38 kg.
|
|
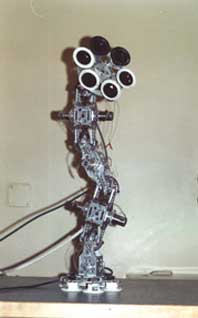
Multi-purpose robot for motion along arbitrarily oriented surfaces.
It is designed as a modular multi-link structure, each module having
two degrees of freedom. The end modules are equipped with vacuum
grippers. Operating characteristics. Type of drives: electromechanical.
Load carrying capacity: 1.5 kg. Maximum velocity: 3 m/min. The length
of the robot (when stretched): 1000mm. The diameter of the gripper:
240mm. Mass: 10.5 kg.
|
 |
 |
Robot for cleaning and inspecting arbitrarily oriented flat surfaces.
The robot can move from one surface to another. The transport module
of the robot is a wheeled platform, which is kept on an inclined
surface by means of a sliding vacuum gripper. Operating characteristics.
Maximum velocity: 0.4 m/s. Mass: 22.5 kg. Load carrying capacity: 5 kg.
Overall dimensions: 800mm (length) x 400mm (width) x 270mm (height) mm.
|
|
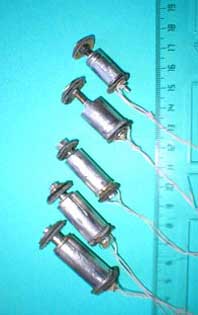
Mobile mini-robots that can move inside pipes of a diameter of 10 to
20mm and to perform technical diagnostics operations. Various
modifications of such robots have been developed. Operating
characteristics. Type of the drive: electromagnetic, microstepping,
reciprocating. Load carrying capacity: 2 to 20 g. Velocity of the robot:
up to 60 to 70 mm/s in the resonant mode. Mass: from 20 to 50 g.
|
 |
